角度传感器与倾角传感器工作原理的区别
倾角传感有三种不同工作原理,倾角传感器有气体.液体.固定三种不同基本原理的倾角传感器,工业等行业大多数使用的是MEMS倾角传感器,基本原理可以参考
https://www.zc-sensor.com/news/news-1767(倾角传感器的原理)
角度传感器结构原理如下图
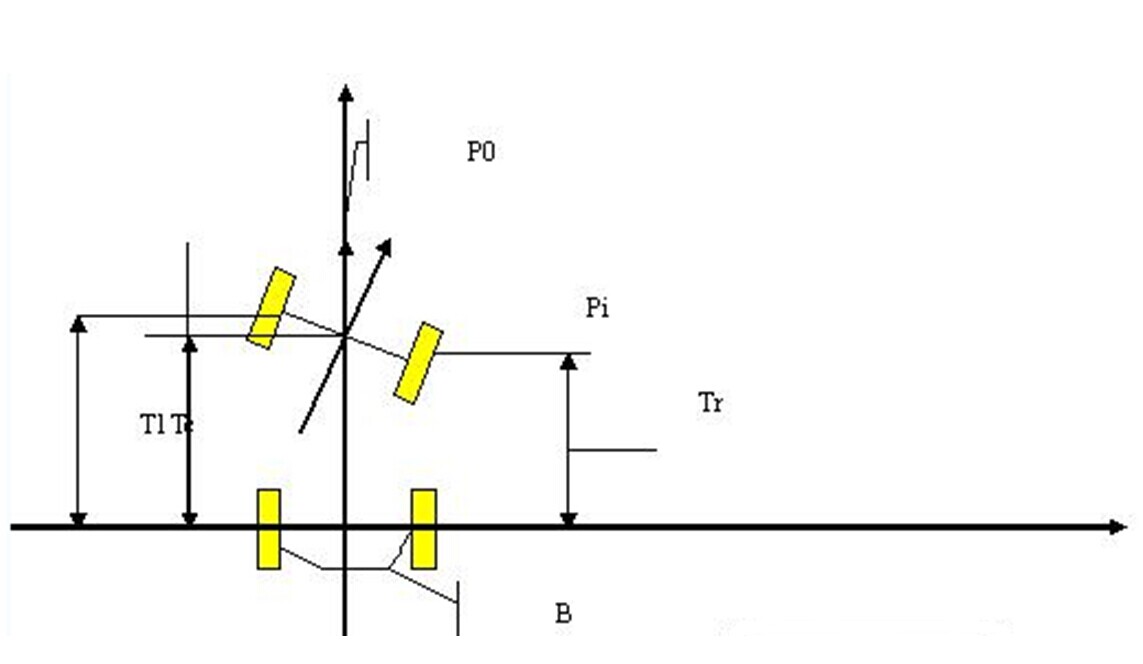
机器人有两个角度传感器,通过传动链将每一个角感连接到主动轮上。轮子的直径为D,R为角感的分辨率,G为编码器与轮子的传动比,你
能得到一个转换系数F,它将角度传感器的每一个单位转换成响应的运动距离:
F = (D x π) / (G x R)
这个比的分子是D x π,表示轮子的圆周长,它刚好等于轮子转动一周运动的距离。这个比的分母是G x R,定义编码器计数的增量刚好等于轮子的一转。F就表示每跳动一下移动的单位距离。
机器人使用最大的轮子,它的直径是81.6mm。角度传感器每一转有16的分辨率,她与轮子的传动比是1;5(轮子转动一圈,角度传感器转动5圈)。结果是:
F = 81.6 mm x 3.1416 / (5 x 16 ticks) =3.2 mm/tick
就是说每次传感器计数一次,轮子就会运动3.2mm。在任何给定的时间间隔,左轮运动的距离TL等于角度传感器计数的增量IL乘以系数F
TL = IL x F
同样,对右轮:
TR = IR x F
机器人的中心点,就是在连接两轮的的中线上的一点,它移动的距离是TC
TC = (TR + TL) / 2
为了计算方向ΔO的变化你需知道机器人的另一个参数,轮子间的距离B,或更精确一点,轮子与地接触的那两点间的距离。
ΔO = (TR – TL) / B
这个公式返回的值ΔO是弧度,使用下面的关系式将弧度转变为角度。
ΔODegrees = ΔORadians x 180 /π
你现在可以计算机器人的相对方位,在I时刻的新方位ΔO是建立在I-1时刻的方位变化ΔO
O是机器人所指的方位,为ΔO选择同样的单位的结果是:
Oi = Oi-1 + ΔO
同样的,新的中心点卡迪尔坐标是根据前一中心点移动距离的增量:
xi = xi-1 + TC x cos
yi = yi-1 + TC x sin Oi
这两个三角函数把移动距离的矢量表示转换成卡迪尔坐标。
不幸的是,在进行定位时你无法除去三角式中角度O,还好,有些特殊的情况,你可以避免三角函数,比如,当机器人在某个位置精确的转动90度,并按照你所期望的笔直往前走。在这种情况下,x或y有一个是常量,其它运动距离的增量TC也同样。使用双差速齿你只需要一个角度传感器,安装在左或右轮上。这个机械结构保证了当一个马达打开时机器人直线驱动,当另一个马达打开时机器人就转弯,在第一种情况下,角度传感器,角度传感器将会测量小车运动的直线距离TC,而在第二中情况下,你必须要根据角度传感器的增量让它以90度的倍数旋转。同步驱动轮子的转动只能限制在90度范围内,关于这个方向改变角度的物理约束,你确信使用右角度来处理。将角度传感器连接到马达上。
角度传感器与倾角传感器使用范围的区别
倾角传感器主要应用于角度测量,零位调整,水平调整
倾角开关(十二路开关信号)
安全控制,报警,监控
机械臂,大坝,建筑,桥梁角度测量
对准控制,弯曲控制。
初始位置控制,倾角姿态记录仪
汽车四轮定位
高空作业车
角度传感器主要应用于系列倾角,角度传感器,距离传感器,加速度传感器,以及测量方位用的数字罗盘,电子罗盘和陀螺仪已经广泛的应用应用于石油,煤炭,钢铁,船舶,隧道,医疗设备,大坝,机械,物探仪器,地质,岩土,石油,矿山,管道,测斜导管,铁路、港口、水利、高层建筑,墙洞,矿井、隧道、船坞、抗滑桩和板桩,煤矿,动态冲击实验,地质,卫星GPS系统,风水,越野车,航海,实验仪器,数字水平仪,医疗,机械调平,角度测量和监视,汽车,起重机械运动检测,康复系统,生物工程系统,虚拟现实、现实放大,体育,惯性导航系统,人体姿态测量工业机械,摩托车陀螺仪,光纤,制导,平衡,导向,方向测量,动态跟踪,捷联,惯性,导航,方位角,角速度,速率,机械,爆转,测量等行业。


