为此皮带秤的精度主要取决于两个方面:一是称重传感器测量的准确性,二是传送带速度的测量。实际过程中,正真对测量结果起到决定作用的是重量测量的准确性。为提高测量精度,通常在皮带秤上装有倾角传感器来对称重过程中的误差进行修正。
下面我们看看倾角传感器是如何在皮带秤中帮助提高测量精度的。我们知道称重传感器是靠施加在其接触面上的压力来对物体重量进行测量的,而在一般情况下都是水平测量的,即重力完全作用于测量面上。此时,测量值就等于真实值。然而,在皮带秤的实际测量过程中,皮带的传送面不是水平的,这时称重传感器测量的就是真实重量的一个分量。因而,需要倾角传感器对当前的倾斜角度进行测量,以根据倾斜角的不同对称重值进行不同程度的修正。由于倾斜引起的误差与该角度余弦值有关,从而误差大小变化也不是线性的,因此,每次测量都必须进行单独修正,而倾角传感器的测量精度和稳定性必须要好。
直川ZCT系列倾角传感器是一款单轴,±30°测量范围的高精度倾角测量器件,该产品凝聚了VTI多年在运动传感器领域的技术经验,并采用了VTI独有的3D-MEMS专利技术,确保了产品在整个测量范围内保持了较高的精度和稳定性。此外,内部自带多种自我诊断系统且进行了温度补偿,同时,还具有出色的耐冲击性。这一系列优异的性能和特点使得成为了同类产品中的佼佼者。
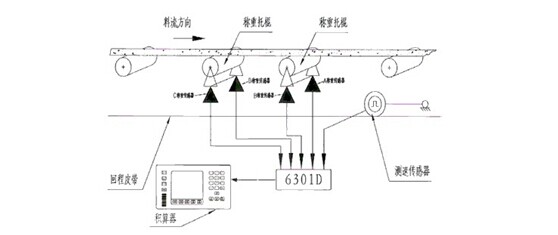
当皮带输送机水平安装时,承载器上安装的称重传感器所受的力如为F2,那么当皮带输送机安装有一定倾角α时(见图1),承载器上安装的称重传感器所受的力则为F1。
F 1=F 2×cosα (1)
COSα值的大小决定了对秤的使用准确度的影响程度,可见表1。

电子皮带秤是皮带输送机输送固体散状物料过程中对物料进行连续称重的一种计量设备,早期的电子皮带秤使用了称重传感器、测速传感器两类传感器,而倾角传感器只是在需要测量皮带倾角的特殊情况下才使用的。如果皮
概述
电子皮带秤是皮带输送机输送固体散状物料过程中对物料进行连续称重的一种计量设备,早期的电子皮带秤使用了称重传感器、测速传 感器两类传感器,而倾角传感器只是在需要测量皮带倾角的特殊情况下才使用的。如果皮带输送机输送物料过程中的倾角有较大范围的变化(特别是在皮带输送机本 身倾角就比较大的情况倾角再有变化),对皮带秤的使用准确度就会产生很大的影响。
倾角变化对皮带秤的使用准确度的影响
分析一下表1,可以得到这样几个结论:
1) 因为cosα值始终小于1,所以皮带输送机倾角变化的影响使得皮带秤秤架的受力减少,例如,α=15°时,cosα =0.9659,如果F2=100kg,则F 1=F 2×cosα =100×0.9659=96.59(kg)如果皮带输送机在使用过程中倾角由0°变化到15°,则由此产生的误差为3.41%,这样大的误差值是绝对不 允许的。
2)当皮带输送机在0°倾角(即平皮带输送机)或低倾角运行时,倾角度数的稍许变化对称量准确度影响不大。例如当倾角度数变化发 生在0°到3°之间时,cosα值仅从1.0000减少到0.9986,即由角度变化引起的最大误差还不到0.12%;当倾角度数变化发生在0°到8°之 间时,cosα值仅从1.0000减少到0.9903,即由角度变化引起的最大误差还不到1%;所以在生产现场允许误差范围内,在皮带输送机低倾角运行时 某些小范围的角度变化也可以忽略不计。
3)当皮带输送机在大倾角运行时,倾角度数的变化对称量准确度影响较大。例如当皮带输送机固有位置 在18°倾角运行时,如果倾角减小到17°,则由角度变化引起的误差达到:(0.95630.9511)/0.9511=+0.55(%)如果倾角增加到 19°,则由角度变化引起的误差达到:(0.9455-0.9511)/0.9511=-0.59(%)对于某些高准确度的计量皮带秤来说,在这种情况下 皮带输送机倾角度数的1°变化将导致近0.6%的误差,这是很难被认可的。
由此可见,以下任何一种情况出现时需要设置倾角传感器对皮带输送机的倾角变化进行补偿;皮带输送机倾角变化范围大;皮带输送机固有位置的倾角较大且皮带输送机倾角有一定范围的变化;皮带输送机对计量准确度要求较高且皮带输送机倾角有可能发生变化。
对 具体的应用场合,需了解皮带输送机固有位置的倾角和倾角可能的变化范围,然后采用上述计算方法计算出由角度变化引起的最大误差。作者建议,如果计算所得误 差值小于计量准确度要求值的1/3,则可以不设置倾角传感器对皮带输送机的倾角变化进行补偿。如果大于计量准确度要求值的1/3或倾角可能的变化范围难以 确定,则一定要设置倾角传感器对皮带输送机的倾角变化进行补偿。
据系统设备公司介绍,该使用的ZCT倾角传感器的补偿范围是0~30°,补偿的效果是可以将补偿前造成的误差减少到1/50,典型的数值是可将皮带输送机倾角变化所造成的误差减少到0.15%。




